paulhammond5155
u/AWildMimicAppears
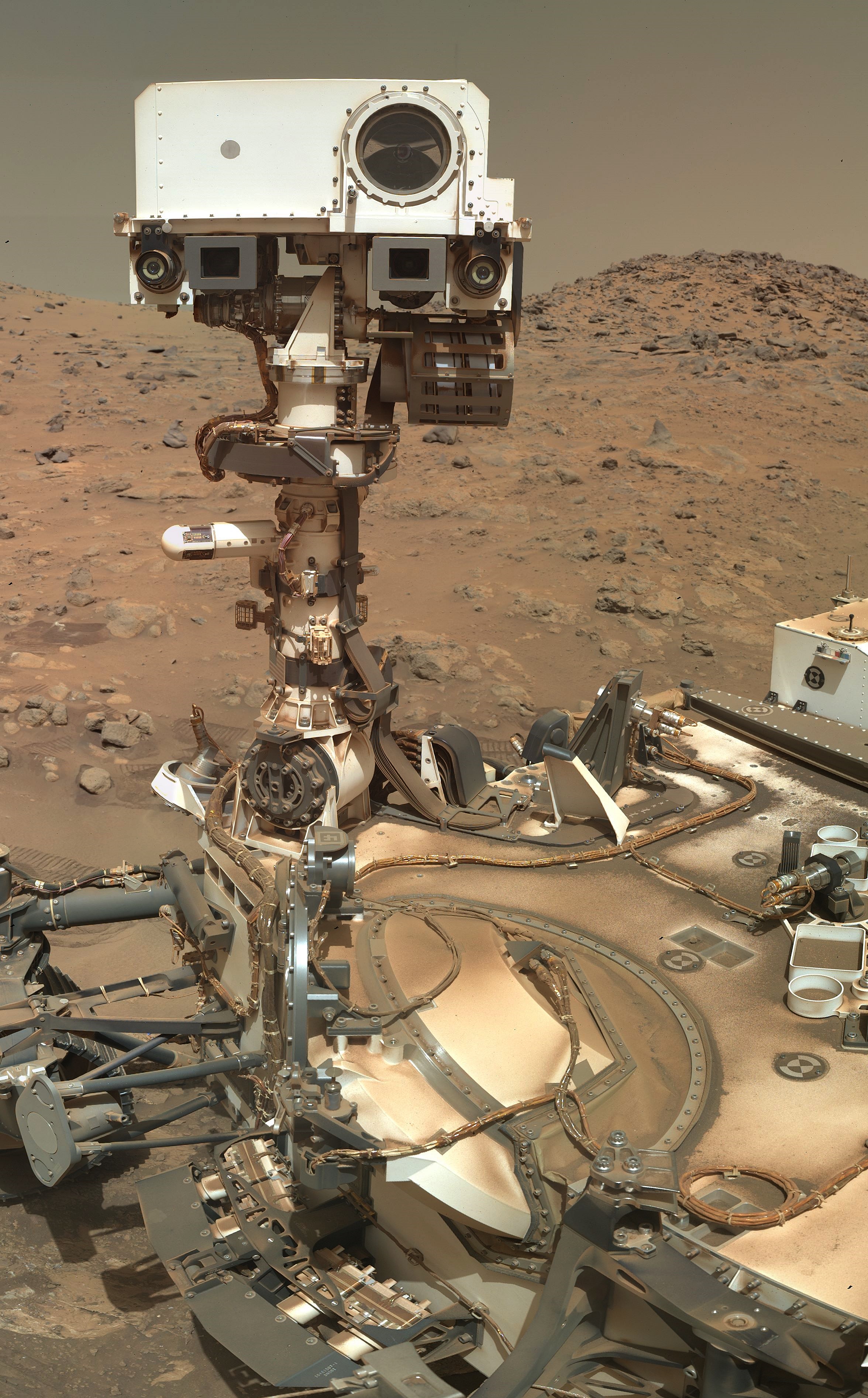
These are Fiducial Markers (or fiducials for short). Fiducials basically allow the rover’s computers to measure itself.
The markings are a staple of engineering that can serve two parallel purposes, to calibrate cameras and to calibrate various mechanisms on the rover.
They’re a common feature in high-tech photography and robotics here on Earth, but the use of fiducials on extra-terrestrial robots is relatively new.
The technique started informally on the Mars Exploration Rover (MER) mission, which landed Spirit and Opportunity on the Red Planet’s surface in 2004.
JPL engineers noticed that, over time, the accuracy of the MER robotic arm was degrading, and they weren’t really sure why. So some of the JPL engineers came up with an algorithm that would just recognize a circular feature on the end of the arm. Then every day, it could track where that actually was versus where the robotic rovers thought it was. The idea blossomed into more than just an engineering hack with Curiosity. JPL engineers came up with the design for the fiducials for Curiosity, as they needed something that would be easy for either a computer program or a person to accurately pick the center of. Having that intersection in the middle makes it easier for a person, as they can zoom in on the image and click exactly on that intersection, and the design also makes it easy for a computer, because it can compute the center of a circle. From there, basic trigonometry lets engineers piece together the positions and orientations of the various parts of the rover.
To measure all of the mechanisms on the rover, fiducials are installed all over the turret, on the end of the rover’s arm, as well as on the tops of the steering actuators and on the top deck of the rover.
They were so useful they are now installed on the Mars Insight lander and the M2020 rover.
M2020 also uses the smaller ‘April Tags’. They’re fiducial markers for machine vision systems and are “robust to lighting and viewing angle”.
I’m not sure what the actual definition is, but I would not consider it a crash if the aircraft performed a controlled landing, incurred no damage and flew again without repair.
Imagine a scheduled flight between New York and Paris that developed an issue that forced it to land early in London. I would not call that a crash, I would call it a unscheduled (emergency) landing.
The terrain (deep sand) is too dangerous for the rover to traverse across (it could get stuck and that would be mission over for the rover) Even if it could traverse across, there is no way to pick up the helicopter. Instead the helicopter will spend the rest of its days waking up every morning and listening for a transmission from the rover for a total of 50 minutes, if it gets no signal during those 50 minutes, it will sleep until the next day and repeat until it is no longer able to wake up. Since flight 72 the Helicopter has sent back over 2,300 images… Link to all those images: https://mars.nasa.gov/mars2020/multimedia/raw-images/?begin_sol=1036&end_sol=1136&af=HELI_NAV,HELI_RTE
@weariedfae
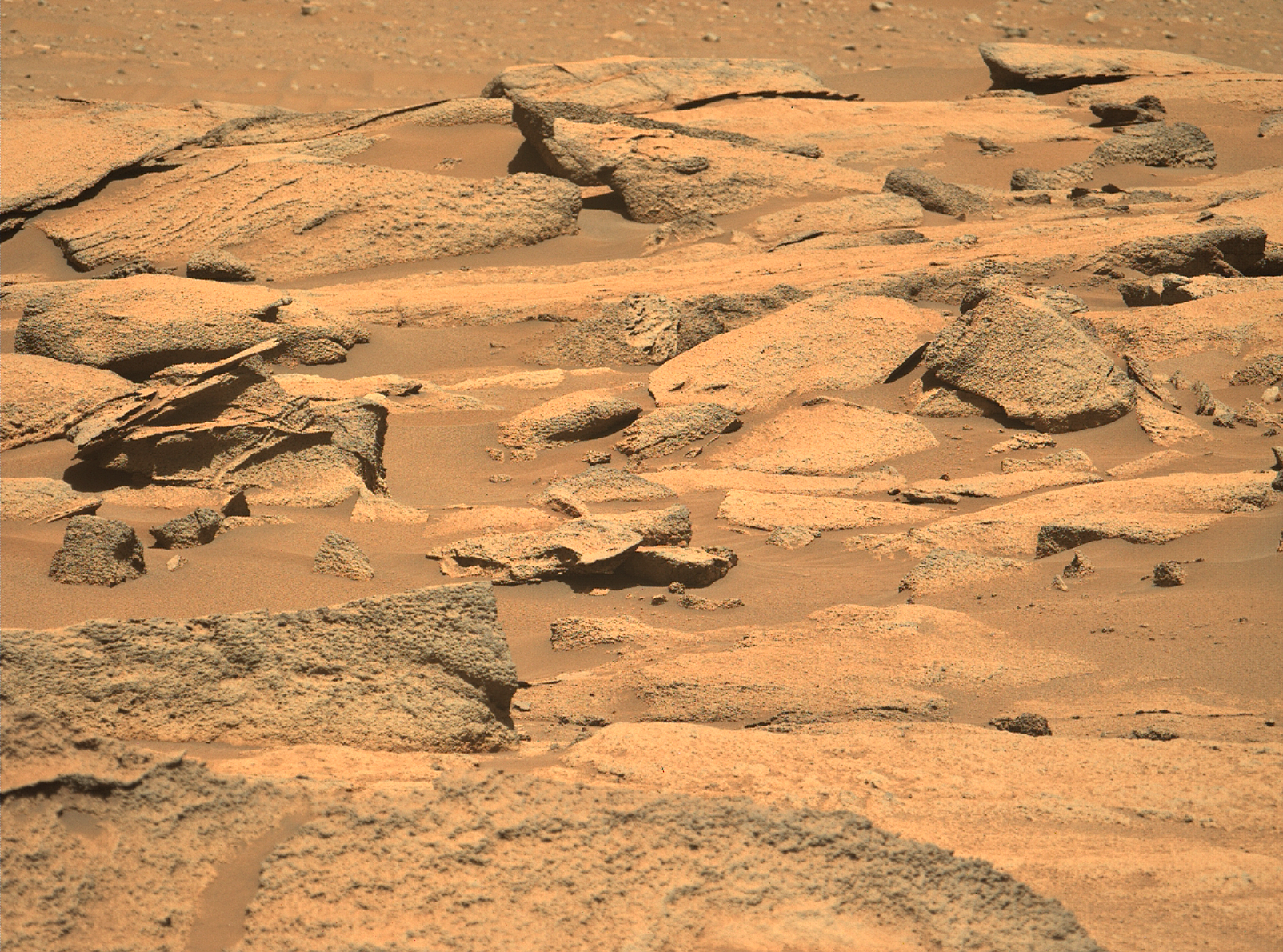
It is possible, as the rover is heading for Bright Angel (BA) it’s the west of the current location. This float rock could be from Bright Angel, so could have been washed down Neretva Vallis by floods etc ~3 billion years ago. BA appears to the white in the HIRISE images, BA is thought to be the oldest rocks the rover will encounter and probably predate the impact that formed the crater, so they could be of volcanic origin… Watch this space
Edit. fixed typos
From the data that JPL got before the brownout the helicopter was only 1 meter from the ground when it all went wrong. Sadly the brownout meant no data from the IMU was saved in those last seconds before it landed. It must have experienced some pretty harsh vibrations. But it powered up again and has been communicating via the rover to Earth. It has sent back an incredible 2,396 images and a bunch of engineering data since the emergency landing (all those images are post landing) Link to the post landing images:- https://mars.nasa.gov/mars2020/multimedia/raw-images/?begin_sol=1036&end_sol=1136&af=HELI_NAV,HELI_RTE
Since deployment it has sent back 14,551 images (so far) and they will stay in touch with it until the rover drives out of Jezero when radio contact will be lost. The helicopter has no off button. It will wake up every morning that its batteries etc keep working, it will wait until a preset time and it will listen for a radio call from the rover for exactly 50 minutes, if it gets no call, it will go back to sleep, and awake the next day and repeat until its no longer able.
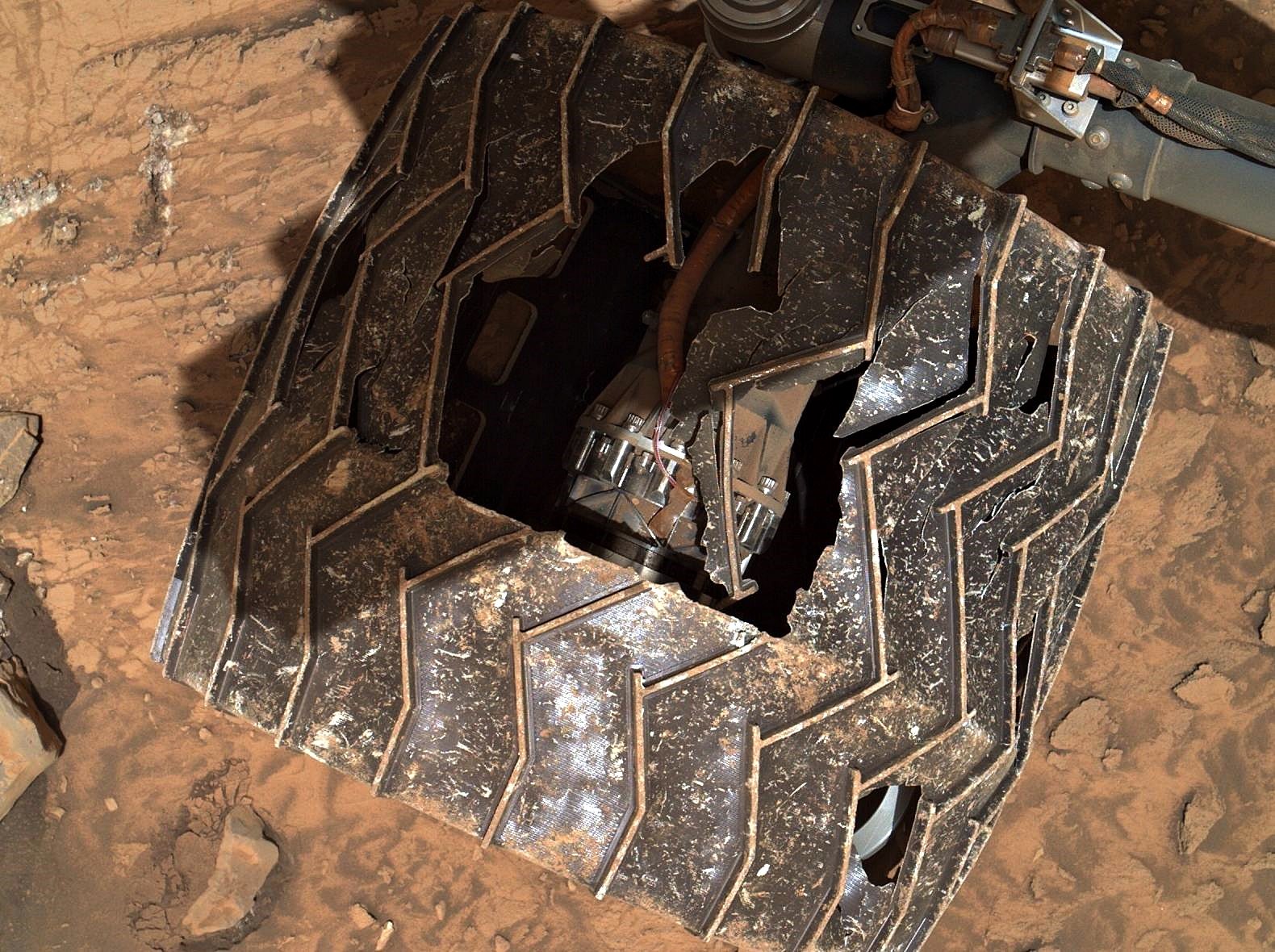
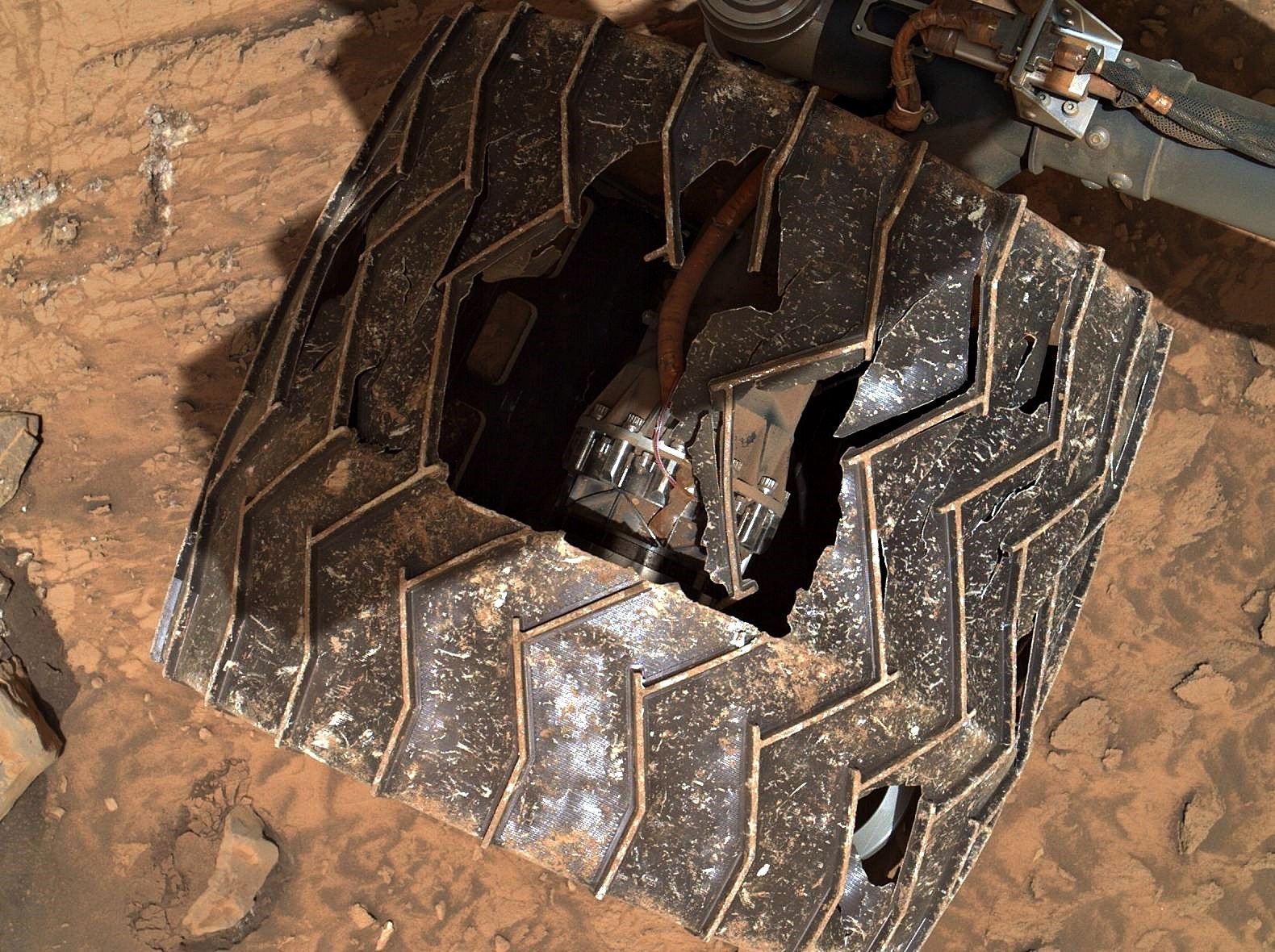
Several years ago they did an engineering study that basically stated that when a specific number of cleats broke it had used up a percentage of its life. We’re past that stage now. They have since developed a scenario that will allow them to rip one half of the damaged wheel off, and still drive on the remaining half… All of the wheels are motorized, losing one wheel won’t stop the rover from traversing to it’s science waypoints












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}